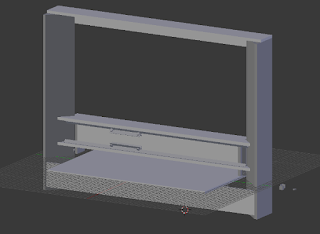
This is the most complicated thing of the whole enchilada. In order to move the whole beam up and down, it has two driving belts, one for each end of the beam, driven together by a shaft. To counter balance the weight of the beam and Y mechanical axis, I choose to use constant force springs, instead of weights for the purpose of reducing the inertia. The constant force springs are expensive, so for now I'm using a low-tech approach, bungee-cords.